전산유체계산을 통한 고속 활주선의 저항성능 및 유동분포 해석
Abstract
Unmanned Surface Vehicle (USV) is being developed to do maritime survey and maritime surveillance at Korea Research Institute of Ships & Ocean engineering (KRISO). The goal is that USV should be operated at the maximum speed of 45 knots and it should be operated at sea state 4. Therefore the planing hull of USV should be excellent in resistance performance and manoeuvring performance. It is needed to check its performance using Experimental Fluid Dynamics (EFD), Computational Fluid Dynamics (CFD) or analytic method before designing the hull. In this study, resistance performance was analyzed by EFD and CFD. EFD with heave and pitch was performed at high speed towing system in Seoul National University. CFD was performed using SNUFOAM based on openFOAM with dynamic mesh to calculate running attitudes. The results of CFD were compared with EFD results. The results of CFD were resistance, running attitudes and wave height. The flow distribution and pressure distribution were also analyzed. The results of numerical resistance was under estimated than EFD. Even though the results of CFD have a slight limitation, it can be successfully used to estimate the resistance performance of planing hull. In addition it can be used as a supplement for EFD results.
Keywords:
High speed planing hull, Resistance performance, Running attitude, Experimental Fluid Dynamics(EFD), Computational Fluid Dynamics(CFD)키워드:
고속 활주선, 저항 성능, 항주 자세, 실험유체역학, 전산유체역학1. 서론
최근 인간의 개입을 최소화하여 효율적인 임무 수행을 위한 무인시스템 중 무인선박의 개발이 활발하게 진행되고 있다. 무선 통신기술 발달로 무인선박의 개발은 점점 빨라지고 세계 각국에서 무인선박에 대한 기술 개발 경쟁이 치열하다. 국내에서는 선박해양플랜트연구소(KRISO)에서 다목적 지능형 무인선을 개발 중에 있다. 최대 속도는 45노트, 해상상태 4에서 운용 가능한 고속 활주선을 개발하여 이를 해양조사와 해양감시에 중점을 두어 다목적 지능형 무인선으로 개발하려고 한다. 무인선으로 개발되는 고속 활주선은 일반적으로 외곽 형상이 선체 주위 유동분포에 큰 영향을 주고 운항 속도 별 자세 변화가 크기 때문에 주로 운용되는 속도에서 유체성능을 고려해주어야 한다. 고속 활주선은 부상량이 크고 트림이 많이 발생하기 때문에 활주시 침수 표면적을 감소시킨다. 침수 표면적의 감소로 선체의 점성 저항이 일반선박보다 작기에 고속에서의 운항이 큰 장점인 선박이다.
고속 활주선의 유체 성능은 모형시험과 Computaional Fluid Dynamics (CFD) 해석 또는 이론계산을 통해 예측한다. 이 중 CFD 해석 결과는 압력분포와 국부적인 유동분포를 확인할 수 있기 때문에 모형시험이나 이론계산 결과를 보완하여 보다 더 자세한 유체성능 분석에 활용할 수 있다. CFD 해석을 통해 고속 활주선의 유체성능을 예측하고 설계에 적용하려는 시도와 노력이 진행 중이다. Kim et al.(2014)는 고속 활주선 선형에 따른 저항성능을 모형 시험과 경험식을 통해 확인하였으며 Park et al.(2015)는 고속 활주선에 대한 저항성능해석을 수행하여 선형 개발에 CFD 해석의 적용 가능성을 보여주었고 Oh and Yoo(2013)은 고속 활주선의 항주자세와 저항을 추정한 바 있다. Kim et al.(2009)에서는 WAVIS와 FLUENT를 이용하여 고속 활주선 주위의 유동분포를 분석하였다.
본 논문에서는 선박해양플랜트연구소에서 진행하고 있는 ‘다목적 지능형 무인선 국산화 개발’ 연구 내용 중 무인선인 고속 활주선 설계에 CFD의 적용 가능성을 확인하였다. CFD 해석을 적용하여 고속 활주선의 유체성능 예측 시 활주선의 항주 자세 계산이 매우 중요하다. 고속 활주선의 항주자세를 정확히 계산하기 위해서는 선체에 작용하는 압력분포를 정확히 예측해야 한다. 선체에 작용하는 압력분포를 정확히 예측하기 위해서 자유수면을 정확히 포착해야 한다. Lee and Rhee(2012)과 Lee et al.(2014)에서 소개된 것과 같이 자유수면을 보다 더 정확히 예측하기 위해 동적압축기법이 적용된 SNUFOAM을 사용하였다. 모형시험과 CFD의 결과 중 저항과 항주자세를 비교하여 정확도 검증을 수행하였으며 CFD 해석 결과로 압력분포와 파형, 파고 등을 확인하였다. 이러한 분석으로 CFD 해석이 고속 활주선 설계에 적용될 수 있는지 가능 여부와 모형시험의 결과 보완 가능성을 확인하였다.
2. 대상 활주선
본 연구에서 설계된 활주선형의 선명은 C1이다. 1/6.5 축소 나선 모형(bare hull)을 제작하여 모형시험과 CFD 해석을 수행하였다. 실선의 길이는 8m 이며 폭은 2.3m로 중량은 3t이다. 이밖에 흘수와 LCG, VCG 등을 포함한 실선과 모형선의 주요 제원은 Table 1에 자세히 나타내었다. C1 선형의 가장 큰 특징은 다음과 같다. 차인은 양의 받음각을 갖도록 설계하였고 선저경사각은 선미부부터 선체중앙부까지 16°에서 24°로 변화한다. 그리고 워터젯 설치를 위한 워터젯 인테이크 면이 선미 근처에 존재한다.

Principal dimensions of hull C1
3. 모형시험
3.1 시험 장비
3.1.1 고속 예인 시스템
Fig. 1은 모형시험이 수행된 서울대학교 선형예인수조의 운용 개념도이다. 길이 117m, 폭 8m, 깊이 3.5m이며 최대속도 10m/s인 무인 고속 예인 전차시스템으로 구성되어있다. 트림각과 부상량 계측을 위해 포텐시오미터가 사용되었으며 저항은 1축 로드셀로 계측되었다. 카메라는 모형선의 자세 및 모형선 주변 유동 촬영을 위해 설치되었다.

High speed towing system in Seoul National University towing tank
3.1.2 파고 측정 시스템
파고 측정 시스템은 Fig. 2와 같다. 프레임을 사용하여 고속 예인 시스템에 초음파 파고계를 설치하였다. 파고 측정에 사용된 초음파 파고계의 감지거리는 150-1500mm이며 감지각도 범위는 8도, 오차범위는 ±2mm 이다.

Wave measurement system
3.2 모형시험 결과
C1 모형선을 대상으로 상하동요(Heave)와 종동요(Pitch) 두 가지를 허용하여 정수 중 모형시험을 수행하였다. Fig. 3은 부상량(위), 트림각(중간) 그리고 저항(아래)의 결과의 도표이다. 속도 조건은 실선 기준으로 5 ~ 45knots 조건이며 길이기준의 프루스 수(Fn)는 각각 0.304, 0.608, 0.912, 1.216, 1.520, 1.825, 2.129, 2.433, 2.737이다. 부상량은 10 ~ 35knots 까지 증가하는 경향을 보이지만 35knots 이상에서 감소한다. 선속 조건 15knots 에서 5.39° 최대 트림각으로 증가하지만 그 이후에 서서히 감소하는 경향을 보여준다. 마지막으로 저항은 중량으로 무차원화 한 결과로서 W로 표기하였다. 15knots 와 20knots 조건에서는 거의 비슷한 저항을 보여주지만 전체적으로 선속이 증가할수록 저항이 증가하는 경향을 보인다.

–sinkage(up), trim angle(middle), resistance(bottom)
4. 수치해석 기법
4.1 지배방정식
비압축성 유동에 대한 연속방정식은 식(1), 운동량 방정식은 식(2) 와 같다.
| (1) |
| (2) |
여기서 𝜌는 밀도, 𝛺는 제어체적, 는 운동량 생성항이다. 은 단위법선 벡터, 는 유체의 속도, 는 셀의 경계면을 의미하고 𝜇는 유체의 점성계수, 는 압력이다.
4.2 수치적 기법
4.2.1 자유수면과 동적 압축 기법
자유수면을 처리하기 위해 Volume Of Fluid (VOF)를 사용하였다. 자유수면 근처 경계면의 번짐으로 생기는 비 물리적인 현상 발생을 막기 위해 고해상도 차분법을 사용한다. 하지만 격자 질에 따라 경계면이 번져 문제를 정확히 해결하지 못하는 경우가 발생할 수 있다. 이러한 문제를 해결하고 보다 정확한 자유수면 처리를 위해 경계면이 번지는 방향과 유속의 방향에 따라 경계면을 압축하는 경계면 동적 압축 기법을 적용 하였다. 경계면 압축 기법은 체적분율 이송 시 발생하는 수치 확산을 감소시켜 비 물리적인 현상을 최소화하기 위해 상류차분도식과 하류차분도식을 혼합하여 사용한다. 경계면 동적 압축 기법은 식(3)과 같이 수정된 체적분율 이송방정식이 사용된다. 식 (4)는 자유수면의 법선 방향으로 해가 번지는 속도()를 의미한다.
| (3) |
| (4) |
경계면 압축 기법은 수치 확산을 강제로 줄이는 방법으로 수치 확산이 없는 부분에서도 경계면 압축 기법이 적용 되는 문제점이 있다. 이러한 문제는 비정상적인 해가 계산 될 수 있기 때문에 동적 경계면 압축 기법을 사용한다면 이러한 문제를 해결해야 한다. 이 문제를 해결하기 위해 는 Compressive Interface Capturing Scheme for Arbitrary Meshes (CICSAM)과 High Resolution Interface Capturing Schemes (HRIC)에서 사용된 혼합함수의 개념을 이용한다. 상경계면의 번짐을 억제하면서 비정상적인 해가 계산되지 않게 식 (5)와 같이 처리된다.
| (5) |
| (6) |
Fig. 4는 유속, 격자, 상경계면에 따른 경계면 압축계수의 계산을 설명한다. 는 식 (6)과 같이 , 와 의 함수로 이루어져있다. 는 셀 중심점과 인접하는 셀 중심점 사이의 거리벡터를 의미하고 면 중심점에서의 속도인 , 는 계산에 사용되는 시간간격이다. 는 셀의 skewness와 유속에 따라 값이 정해지며 skewness가 좋지 않은 격자일 경우 는 0에 가까워질 수 있다. 셀 중심점에서의 체적분율 구배와 인접하는 셀 중심점에서의 체적분율 구배를 거리에 따른 가중치를 두어 평균을 구할 수 있다. 는 이렇게 평균을 구한 면 중심점에서의 구배를 나타내는 값이다. 이에 따라 의 값이 유속의 방향과 경계면의 법선 벡터가 이루는 각에 따라 0에서 1의 값을 가진다. 이와 같은 경계면 동적 압축 기법을 적용한 SNUFOAM은 오픈소스 CFD 라이브러리인 OpenFOAM을 기반으로 한 프로그램이다. 주상체 해석으로 자유수면의 경계면 압축 기법이 활주선과 같은 날카로운 형상을 포함한 문제를 비교적 잘 해결한다고 Lee(2015)에서 검증하였다.

Velocity, grids and calculation of compression coefficient depending on shape of phase boundary
4.3 격자계
4.3.1 격자 민감도 테스트
격자의 질이 좋더라도 불필요하게 격자가 많을 경우 해석 시간이 길어지고 격자가 적을 경우 중요한 부분의 해석을 정확히 해석하지 못하거나 오류가 쌓여 타당하지 않은 결과를 얻을 수 있기에 해석에 적당한 격자 개수와 분포를 확인하기 위해 격자 조밀도 테스트를 수행하였다. 선체 주변을 중심으로 Table 2와 같이 C1의 격자를 생성하였다. 모형시험에서 얻은 부상량과 트림각을 격자에 적용시켜 항주자세를 고정하여 해석을 수행하였다. 선체의 폭과 길이는 약 배로 격자수를 증가시켜 세 가지의 격자를 완성하였다. 인테이크 면과 스테그네이션 라인 근처에 좀 더 조밀하게 격자를 배치하였다. 대표적으로 속도조건 15knot인 경우를 나타내었다.
The number of grids of hull C1
Table 3은 중량으로 무차원화 한 저항을 비교했다. 모형시험의 결과와 비교했을 때 coarse 격자의 결과는 약 16%, medium 격자는 0.6%, fine 격자는 0.5%의 차이를 보였다. 격자수가 증가할수록 모형시험과 근사한 결과를 보여주는 것을 알 수 있다. Table 4와 같이 격자수에 따른 압력분포를 확인해보았다. 압력은 속도와 밀도를 이용해 무차원화 하여 Cp로 나타내었다. Fig. 5는 반폭 모형선의 선체 바닥면을 나타내는 그림이며 A, B, C로 나타낸 세 군데의 압력분포를 확인했다. 반폭이 아닌 전체 모형선으로 보았을 때 A는 선체의 중앙선이며, B는 선체 중앙선으로부터 폭의 25% 떨어진 위치이며 C는 선체 중앙선으로부터 폭의 50% 떨어진 위치를 나타낸다. Figs. 6, 7, 8은 A, B, C 에서 선체 길이방향을 따라 나타낸 압력분포의 2차원 도표이다. coarse 격자는 medium 격자와 fine 격자의 결과와 압력분포가 다른 경향을 보이지만 medium 격자는 fine 격자와 비슷한 압력분포를 보였다. 따라서 medium 격자보다 더 많은 격자를 배치해도 압력의 경향과 값이 크게 변화하지 않는 것을 알 수 있다. medium 격자와 fine 격자 모두 1% 미만의 작은 오차를 보이며 상대적으로 해석시간이 경제적인 medium 격자를 선택하여 해석을 수행하였다.
The comparison of non-dimensional resistance
The comparison of bottom pressure depending on the number of grids

Lines of pressure measurement position on bottom hull

Comparison of Cp at A

Comparison of Cp at B

Comparison of Cp at C
4.3.2 격자 생성 및 격자 변형 테스트
약 130만개의 정규 격자(Structured grid)로 반폭 모델을 이루고 있으며 Fig. 9와 같다. 자유수면을 포함하는 계산으로 자유수면 근처의 격자를 좀 더 조밀하게 생성하였다. 상하동요(Heave)와 종동요(Pitch)를 고려하기 위한 병진운동과 회전운동을 구현해야하기 때문에 비정합 경계면과 격자 변형 기법을 사용하여 병진운동과 회전운동을 가능하게 하였다. 이는 실린더 형태의 계산 영역으로 생성되었고 바깥쪽 계산 영역과 비정합 경계면을 사용하여 이를 구현하였다.

Grids
계산 도메인은 Fig. 10과 같으며 도메인의 크기는 시험선의 길이를 1L이라 하면 이를 기준으로 나타낼 수 있다. –1.0L < x < 2L, 0 < y < 1.5L, -2.0L < z < 1.0L의 크기이다. 저항성능 해석이기 때문에 계산 시간을 줄이기 위하여 대칭면을 적용한 반폭계산을 수행하였다. 병진운동과 회전운동을 위해 해석 전 격자 변형에 대한 확인이 필요하다. Fig. 11은 격자 변형 테스트를 수행한 결과이다.

Domain and boundary condition

Deformation test of grids
4.4 수치해석 조건
경계 조건은 유입류 조건으로 유속과 정수압에 Dirichlet 타입의 경계조건을 사용했고 유출류 조건은 유속, 체적분율(𝛼)에 Neumann 경계 조건을 부여하고 정수압 조건을 사용했다. 시간 전진은 1차 정도를 가지는 오일러 음해법을 사용했고 대류항은 2차 정도의 상류 차분 기법을 사용했다. 확산항은 2차 정도를 가지는 중심 차분 기법을 사용했다. 난류 모델은 Realizable k-epsilon 모델을 적용하였다. y+는 30이상 100이하이다. 속도와 압력 연성은 Pressure-implicit with splitting of operators (PISO) 알고리즘을 사용하였다.
5. 수치해석 결과
모형시험 결과와 해석 결과를 비교하였다. 부상량과 트림각 그리고 저항을 비교하였다. 비교한 속도조건은 10, 15, 20, 30knots 네 가지 속도이며 이에 해당하는 프루드 수는 0.608, 0.912, 1.216, 1.825이다.
5.1 부상량
Fig. 12와 Table 5는 부상량을 비교한 결과이다. 전체적으로 해석 결과(CFD)가 시험결과(EFD)에 비해 크게 예측하는 경향을 보인다. 이 때 최대 10mm정도 차이까지 보인다. 이런 차이를 보이는 이유 중에 하나는 C1 선형의 특징인 워터젯 인테이크 면이 평면으로 평면에 가해지는 압력이 실제 모형시험에서 보다 크게 계산되기 때문으로 예측된다. 이러한 이유로 시험 결과보다 많이 부상하는 결과를 계산하는 것으로 추정된다.

The comparison of –sinkage depending on Froude number
The sinkage depending on Froude number
5.2 트림각
Fig. 13과 Table 6은 트림각을 비교한 결과이다. 트림각은 선속 15knots 조건에서 최대 트림각으로 증가한다. 15knots보다 선속이 더 증가하는 경우 트림각이 감소하는 경향을 보여준다. 선속 15knots 인 경우 가장 큰 차이인 약 0.53°를 보여준다. 이는 모멘트를 과소 추정하는 것이 원인으로 보여진다. 고속 활주선에 작용하는 모멘트는 스테그네이션 라인 근처인 최대 압력이 나타나는 부분의 압력을 예측하지 못하거나 선미부 근처 압력을 정확히 추정하지 못할 경우가 있다. 선속이 20knots 보다 큰 경우에는 트림각이 크게 추정되고 있으며 이는 반대로 모멘트를 과대 추정하는 경우로 사료된다.

The comparison of trim angle depending on Froude number
The trim angle depending on Froude number
5.3 저항
Fig. 14와 Table 7은 저항을 중량으로 무차원화 하여 비교한 결과이다. 해석 결과가 모형시험에 비해 전체적으로 작게 계산하고 있다. 특히 선속이 증가할수록 차이가 커지는 것을 볼 수 있다. 이는 실험의 부상량보다 CFD 해석의 활주선이 더 큰 양으로 부상하는 결과를 보여주는 것의 영향도 있을 것이다. 선속 20knots 이상에서는 트림각도 크게 계산되기 때문에 선속이 증가할수록 저항이 작게 예측되는 것으로 보인다.

The comparison of non-dimensional resistance depending on Froude number
The non-dimensional resistance depending on Froude number
5.4 구속 조건 해석 결과
고속 활주선의 모형시험과 CFD 해석으로부터 저항의 차이를 확인했다. 따라서 항주자세가 같은 조건에서 CFD 해석 결과가 어느 정도 저항을 예측하는지 확인하기 위하여 구속 조건 해석을 수행하였다. 구속 조건 해석을 수행하기 위해 실험에서 얻은 부상량과 트림각을 적용하여 격자를 생성하였다. 프루드 수는 0.912와 1.825 두 가지 조건에서 수행하였다. 이는 실선 기준으로 각각 15knots와 30knots에 해당한다. 저항 성분을 압력에 의한 저항()과 전단응력에 의한 저항() 두 가지로 나누어 비교하였다. 모형시험에서 얻은 저항은 ITTC1957 방법을 적용하여 압력에 의한 저항()과 전단응력에 의한 저항()로 나누었으며 이를 계수로 무차원화 하여 나타내었다. 전단응력에 의한 저항을 무차원화 값()을 식(7)과 같이 얻을 수 있다. 총 저항의 무차원화 값인 는 식(8)과 같은 관계가 있기 때문에 압력에 의한 저항을 무차원화 한 값()은 식(9)와 같이 얻을 수 있다.
| (7) |
| (8) |
| (9) |
이 결과를 Table 8과 같이 비교했다. 는 전단응력에 의한 저항을 중량으로 무차원화한 값이다. 는 압력에 의한 저항을 중량으로 무차원화 한 값이다. 𝜏는 트림각을 의미하고 는 부상량을 의미한다. 전단응력에 의한 저항은 시험보다 약간 작게 추정하고 압력에 의한 저항은 시험보다 약간 크게 추정하는 경향을 확인했다. 하지만 구속하지 않고 상하동요와 종동요를 고려한 해석 결과보다 훨씬 모형시험 결과와 근사한 결과를 보여주었다. 따라서 항주자세가 동일한 경우 상대적으로 저항을 정확도 높게 예측하는 것을 확인했다.
Comparison of resistance components
5.5 압력분포와 힘 비교
Table 9에 선저 압력과 스테그네이션 라인을 비교하였다. 속도가 빨라질수록 인테이크 면의 압력이 크게 나타난다. 인테이크 면이 시작되는 부근의 낮은 압력의 면적 또한 선속이 증가할수록 넓게 변화한다. 인테이크면의 압력으로 인해 부상량이 크게 계산 되는 것으로 예측하고 있다. 특히 스테그네이션라인 근처는 선속이 증가할수록 압력이 커지는 것을 볼 수 있다. 활주선의 바닥면은 Fig. 15와 같이 정의된다. 는 선체의 중심선에서의 물에 잠긴 길이를 나타낸다. 는 차인에서 물에 잠긴 길이를 나타낸다. 그리고 폭을 이용하여 식(10) 과 같이 평균 침수길이를 나타내는 을 계산할 수 있다. Table 10은 두 선형의 계산 결과이며 속도가 빨라질수록 의 크기가 작아지는 경향을 보인다.
| (10) |
Bottom pressure distribution

Geometry of bottom hull
Mean wetted length-beam ratio
Fig. 16과 Fig. 17은 선속에 따른 Sectional force를 x방향(길이 방향)에 따라 나타낸 2차원 도표이다. Sectional force란 x방향으로 압력을 적분한 양이다. x 좌표 0을 기준으로 음의 방향은 선미 쪽을 나타내며 양의 방향은 선수 쪽을 나타낸다. 가장 큰 힘이 나타나는 스테그네이션 라인 근처보다 선미 부근에 위치한 인테이크 면에서 가장 큰 힘이 나타나는 것을 볼 수 있다. 고속 조건에서는 인테이크 면 근처에 상당히 큰 힘이 나타나며 이것이 압력중심에도 영향을 끼칠 수 있을 것으로 보인다.

Sectional force at 0.912(Fn)

Sectional force at 1.825(Fn)
5.6 파형 및 파고 비교
5.6.1 파형 비교
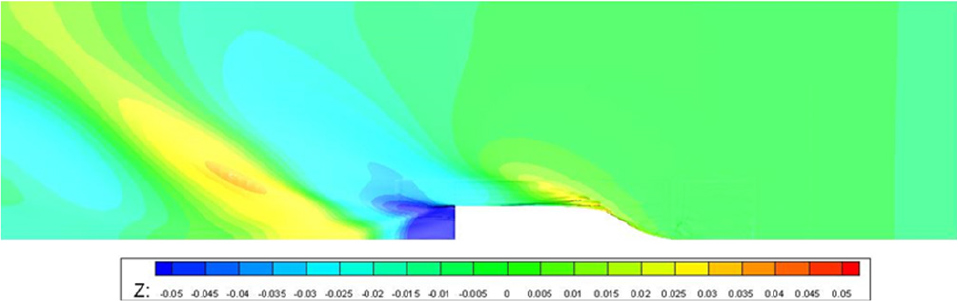
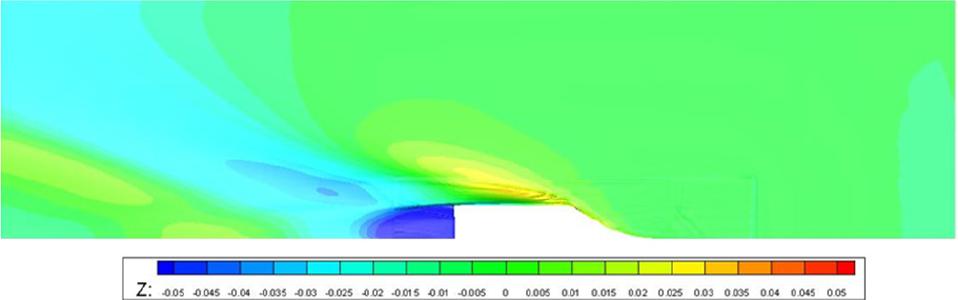
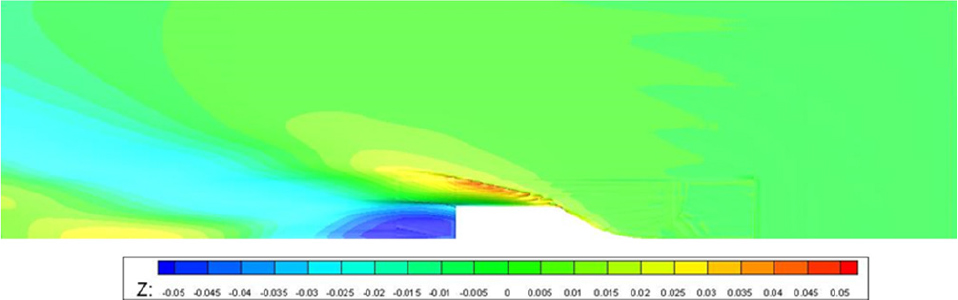
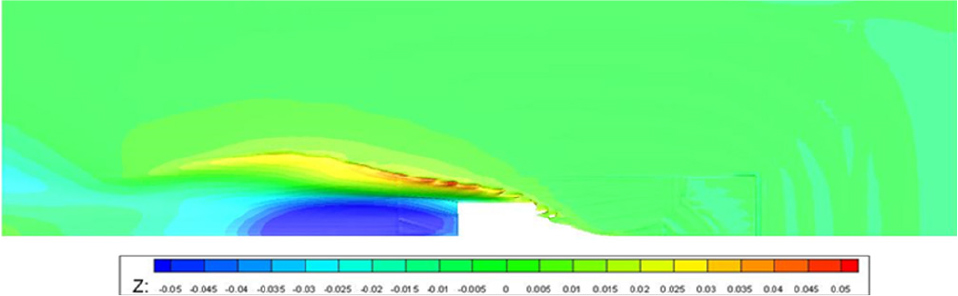
계산된 파형을 선속에 따라 비교하였다. X는 선체의 길이방향, Y는 선체의 폭 방향이며 Z는 선체의 높이 방향을 나타낸다. Table 11은 X-Y 평면으로 본 파형이다. Figs. 18, 19는 Y-Z 평면에서의 파형으로 선수에서 바라본 파형이다. 선속이 증가할수록 선수 근처에서 빨갛게 떨어져나가는 띠 모양의 유동이 생기며 선체와 가까워지는 것을 볼 수 있다. 선속 10knots부터 선속이 증가할수록 트랜섬이 노출 되는 것을 확인하였다. 트랜섬 노출로 인해 트랜섬 근처의 파가 초기 자유수면보다 낮게 꺼지는 현상이 모든 해석 결과에서 나타나며 선속이 증가할수록 이 넓이가 커지는 것을 확인했다. 파의 최대높이는 선속이 증가할수록 높아지며 모형선의 길이 L로 무차원화한 최대값은 약 0.045 정도이다.
Wave pattern of C1 hull

Wave at 0.912(Fn) on Y-Z plane

Wave at 1.825(Fn) on Y-Z plane
5.6.2 파고 비교
트랜섬을 기준으로 선수 방향이 양의 방향, 반대 방향이 음의 방향이다. 선체의 길이 방향은 x, 폭 방향은 y, z는 파고이다. 파고는 자유수면 보다 높으면 양의 값을 갖고 자유수면 보다 낮으면 음의 값을 갖는다. Fig. 20과 같이 A부터 F까지 총 13개의 지점에서 파고를 계측하였다. Figs. 21,22,23,24,25,26은 위치에 따른 파고를 비교한 도표로서 검정색 굵은 선은 선형의 반폭을 Y-Z 평면에서 본 모습이며 흘수(z=0)와 함께 표시하였다. 첫번째로 A 는 x = -0.25 위치인 트램섬부터 뒤쪽으로 0.25m 떨어진 위치에서의 파고를 비교한 도표이다. 해석결과가 실험결과보다 약 18mm 정도 더 높게 계산되었다. B는 x = -0.05위치로서 트랜섬부터 뒤쪽으로 0.05m 가 떨어진 위치이다. 시험결과와 해석결과에서 볼 수 있는 특징 중 하나는 트랜섬이 거의 노출되어 활주한다는 것이다. 이 때 시험결과와 해석결과의 차이는 약 16mm로 아주 미세한 차이를 보이고 있다. C의 위치는 x = 0 의 위치이다. 즉 트랜섬에서의 파고 결과인데 두 결과가 상당히 유사한 결과를 보여준다. D 지점의 결과는 선체 근처인 y = 0.22m 와 0.27m 의 경향이 약간 다르나 선체에서 조금 더 떨어진 지점에서의 결과는 거의 같다. E 지점에서는 x = 0.28m에서의 파고 결과이다. D 지점과 비슷하게 선체와 가장 가까운 지점을 제외한 나머지 지점에서의 결과는 상당히 비슷한 결과를 준다. F 지점에서는 세 지점 모두 동일한 결과를 보여준다. 고속 활주선은 상당히 복잡한 유동을 만들어 시험과 해석의 동일한 지점에서 파고 비교가 어렵다고 판단하였으나 현재로서는 자유수면을 예상보다 정확히 계산하여 어느 정도 실험을 뒷받침할 수 있는 결과를 얻을 수 있었다.

Position of wave height

Wave height at A(x=-0.25)

Wave height at B(x=-0.05)

Wave height at C(x=0)

Wave height at D(x=0.14)

Wave height at E(x=0.28)

Wave height at F(x=0.42)
6. 결 론
본 논문에서는 개발된 고속 활주선에 대해 다양한 선속에서 상하동요(Heave)와 종동요(Pitch)를 구속하지 않은 모형시험과 CFD 해석 그리고 선체를 구속한 상태의 CFD 해석을 수행하였다. CFD 해석으로 모형시험에서 볼 수 없는 선체에 작용하는 국부적인 압력이나 유동분포 등을 확인하고 고속 활주선 설계에 적용이 가능한지 확인하였다.
- 선체를 구속하지 않은 조건에서 모형시험과 CFD 해석 결과 중 저항, 트림각, 부상량 세 가지를 비교하였다. 트림각의 경우 모형시험 결과와 CFD 해석 결과가 최대 0.5도의 차이를 보였으며 부상량의 경우 CFD 해석 결과가 모형시험 결과보다 약 10mm 정도 크게 예측하는 것을 확인했다. 항주자세의 차이로 저항의 차이가 발생했으며 전체적으로 모형시험 결과보다 작은 저항을 예측했다.
- 선체를 구속한 조건에서 CFD 해석의 저항을 모형시험 결과와 비교했다. 항주자세 조건이 동일 한 경우 CFD 해석으로 선체를 구속하지 않은 조건에서의 결과보다 상대적으로 모형시험과 근사한 결과를 보여준다. 따라서 항주자세 차이가 저항 차이에 영향을 주었을 것으로 보인다. 이어서 전단응력에 의한 저항과 압력에 의한 저항으로 나누어 모형시험 결과와 비교했다. 전단응력에 의한 저항이 작게 압력에 의한 저항은 크게 계산되는 경향을 확인했다.
- CFD 해석 결과로 선속 조건에 따른 선체의 바닥압력과 파형 그리고 파고에 대한 결과를 얻었다. 이 중 모형시험에서 얻은 파고와 CFD 해석 결과를 비교하였다. 고속 활주선 자세가 크기 때문에 선체와 가장 가까운 지점은 스프레이 등 복잡한 파형이 존재하여 파고 계측과 계산이 어렵다. 따라서 이 부분에서는 불일치하는 경향을 보인다. 불일치하는 지점 즉 선체와 가장 가까운 지점을 제외한 다른 지점에서는 상대적으로 정확도 높은 파고를 예측한 것을 확인했다.
Acknowledgments
본 연구는 해양수산부 주관으로 선박해양플랜트연구소에서 수행한 “다목적 지능형 무인선 국산화 개발(PMS3870)” 과제의 성과중 일부입니다.
References
- Kim, B.N., Kim, W.J. & Yoo, J.H., 2009. Flow analysis around a high-speed planing hull model. Journal of Advanced Research in Ocean Engineering, 23(4), pp.38-46.
- Kim, D.J., Kim, S.Y. & Kim, S.H., 2014. Platform design and hull form development for multi-purpose intelligent unmanned surface vehicles. Proceedings of the Annual Spring Meeting, SNAK, Busan, Republic of Korea.
- Lee, H., & Rhee, S.H., 2012. Numerical COMPARATIVxxxE study of sharp interface capturing schemes for free-surface flow analysis. Proceeding of the Korean Society of Computational Fluids Engineering, Jeju, Republic of Korea.
- Lee, H., Rhee, S.H., Kim, D., Kim, S.Y. & Park S., 2014. Dynamic interface compression method for redicing numerical interface smearing on free-surface and its application to prismatic body. Proceeding of the Korean Society for Computational Fluids Engineering, Jeju, Republic of Korea.
- Lee, H. B., 2015. A study of computational schemes for six degree-of-freedom motion of a ship in waves - Free-surface flow and floating body motion -. Ph.D. Seoul: Seoul National University.
-
Oh, G.H. & Yoo, J.H., 2013. Numerical prediction of running attitude and resistance of planing craft. Journal of the Society of Naval Architects of Korea, 50(2), pp.95-103.
[https://doi.org/10.3744/SNAK.2013.50.2.95]

- Park, K., Kim, D., Kim, S.Y., 2015. The application for the development on hull form of fast small boat by CFD(1). Proceedings of the Annual Autumn Meeting, SNAK, Geoje, Republic of Korea.